

 contact Us
contact Us
Product
Serialized full-scenario positioning components





• Perceptual measurement
• robot
• Mapping and positioning
• Slow-speed autonomous driving
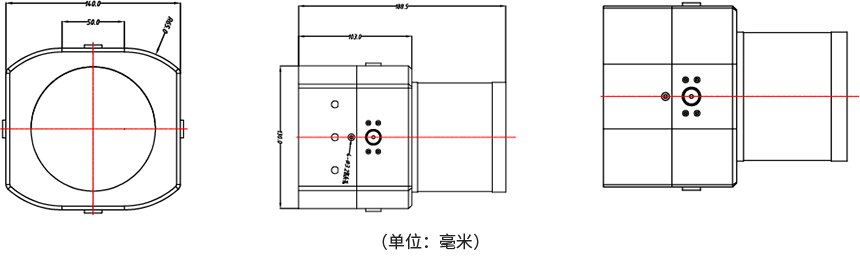
Integrated multi-line lidar
Internally integrated 4-eye surround camera
Internally integrated dual-antenna differential GNSS module
Internally integrated high-performance MEMS-IMU
Internally integrated 3-axis magnetometer and barometer
Internal sensor data collection is completely synchronized with 1PPS
| Classification | parameter | value |
| GNSS | Signal support | BD / GPS / GLONASS / GALILEO / QZSS |
| RTK (RMS) | Plane: 0.8cm+1ppm, elevation: 1.5cm+1ppm | |
| DGPS (RMS) | Plane: 0.4m, elevation: 0.8m | |
| Single point positioning (RMS) | Plane: 1.5m, elevation: 2.5m | |
| Orientation accuracy (RMS) | 0.1°/1m baseline | |
| Time accuracy (RMS) | 20ns | |
| Speed Accuracy(RMS) | 0.03m/s | |
| IMU | Gyro range | ±300° /s |
| Gyroscopic noise | 0.007° /s | |
| Gyro bias instability | 1.64° /h | |
| Gyro noise density | 0.0015° /s/ √hz | |
| Gyro angle random walk error | 0.09° / √hz | |
| Accelerometer range | ±6g | |
| Accelerometer noise | 0.5mg | |
| Accelerometer bias instability | 0.01 mg | |
| Accelerometer noise density | 59.5ug/ √hz | |
| Accelerometer velocity random walk | 35.0mm/s/ √hz | |
| Output data frequency | 200hz | |
| input pulse | Input pulse range | 0~10hz |
| Input level type | TTL level (0-3.3V) | |
| Level hold time | >1ms | |
| Output pulse | Output pulse range | 1~4000hz |
| Output level type | TTL level (0-3.3V) | |
| Level hold time | >250ms | |
| Input pulse maximum current | <5MA | |
| input pulse | Input pulse range | 0~10hz |
| Input level type | TTL level (0-3.3V) | |
| Level hold time | >1ms | |
| Synchronization features | Input-output synchronization accuracy | <5us |
| Output - Output synchronization accuracy | <5us | |
| Internal frequency stability | ±10ppm | |
| Environmental characteristics | range of working temperature | -40℃ ~+85℃ |
| Storage temperature range | -40℃ ~+85℃ | |
| Humidity range | 0~95% | |
| Anti-vibration, anti-shock | IEC 60068-2-6:2007 IEC 60068-2-27:2008 |
|
| Waterproof and dustproof | IP63 | |
| Measured state average current | <100mA (12V power supply) | |
| Power supply characteristics | Supply voltage | DC5~12V±5% |
| Power consumption | <1W | |
| Measured state average current | <200mA (12V power supply) |


400-800-5512
Product
Service
Applications
Download Center
About Us
Product
Service
Applications
Download Center
About Us
Friendship link


 Download
Download
