contact Us
contact Us



The premise and basis of sensor fusion is spatial calibration and simultaneous collection of data. Robooster's unique multi-sensor synchronous data collection system carefully designed can be micro-customized according to user needs, greatly saving developers time and cost, allowing developers to focus more on fusion algorithm design and software implementation.
Customized content includes:
• System architecture, function, solution design
• Sensor selection
• Synchronization solution design
• Software and hardware development
• Structural design and system integration
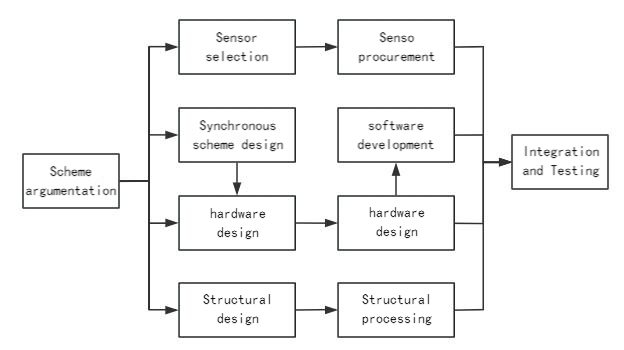
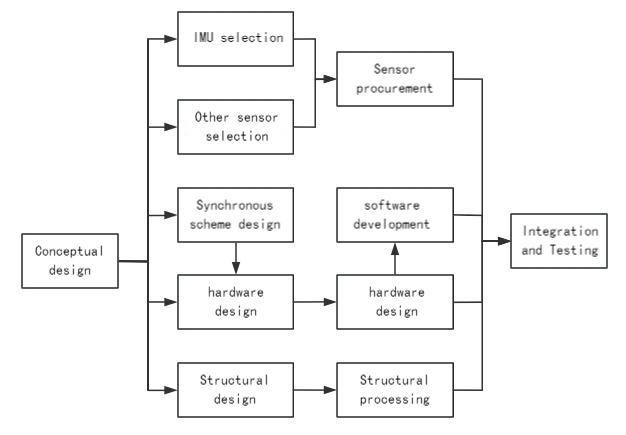
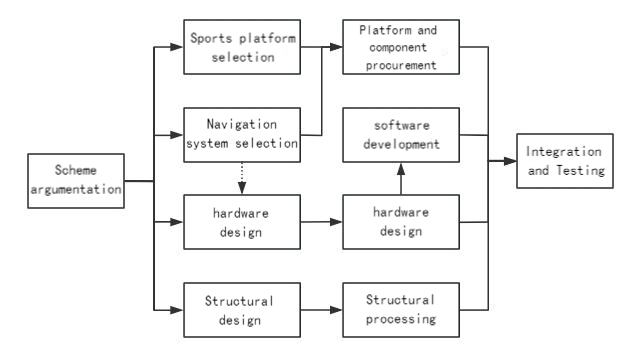
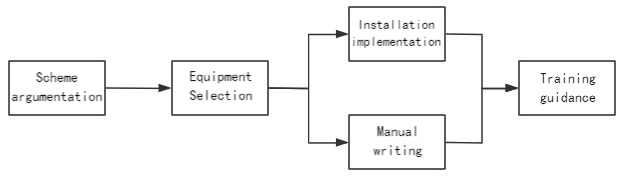
The main process of customization :