

 联系我们
联系我们
产品
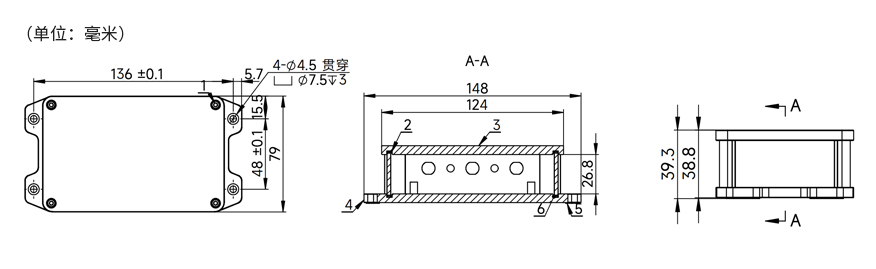
ROBOOSTER位算系列产品-助力泛机器人系统敏捷开发

• 无人机
• 智能驾驶
• 割草机
• 精准农业
内部集成双天线差分GNSS模块
内部集成高性能MEMS-IMU
内部集成3轴磁强计和气压计
内部传感器数据采集完全与1PPS同步
6通道同步触发信号输出
同步信号的频率、触发偏移、有效电平、占空比等参数可独立配置
| 分类 | 参数 | 值 |
| GNSS | 信号支持 | BD/GPS/GLONASS/GALILEO/QZSS |
| RTK (RMS) | 平面:0.8cm+1ppm,高程:1.5cm+1ppm | |
| DGPS (RMS) | 平面:0.4m,高程:0.8m | |
| 单点定位 (RMS) | 平面:1.5m,高程:2.5m | |
| 定向精度 (RMS) | 0.1° /1m 基线 | |
| 时间精度 (RMS) | 20ns | |
| 速度精度 (RMS) | 0.03m/s | |
| IMU | 陀螺量程 | ±300° /s |
| 陀螺噪声 | 0.007° /s | |
| 陀螺零偏不稳定性 | 1.64° /h | |
| 陀螺噪声密度 | 0.0015° /s/ √hz | |
| 陀螺角度随机游走误差 | 0.09° / √hz | |
| 加速度计量程 | ±6g | |
| 加速度计噪声 | 0.5mg | |
| 加速度计零偏不稳定性 | 0.01 mg | |
| 加速度计噪声密度 | 59.5ug/ √hz | |
| 加速度计速度随机游走 | 35.0mm/s/ √hz | |
| 输出数据频率 | 200hz | |
| 输入脉冲 | 输入脉冲范围 | 0~10hz |
| 输入电平类型 | TTL 电平 (0-3.3V) | |
| 电平保持时间 | >1ms | |
| 输出脉冲 | 输出脉冲范围 | 1~4000hz |
| 输出电平类型 | TTL 电平 (0-3.3V) | |
| 电平保持时间 | >250ms | |
| 输入脉冲最大电流 | <5MA | |
| 同步特性 | 输入 - 输出同步精度 | <5us |
| 输出 - 输出同步精度 | <5us | |
| 内部频率稳定性 | ±10ppm | |
| 环境特性 | 工作温度范围 | -40℃ ~+85℃ |
| 存储温度范围 | -40℃ ~+85℃ | |
| 湿度范围 | 0~95% | |
| 抗振动、抗冲击 | IEC 60068-2-6:2007 IEC 60068-2-27:2008 |
|
| 防水防尘 | IP63 | |
| 测量状态平均电流 | <100mA (12V 供电) | |
| 供电特性 | 供电电压 | DC5~12V±5% |
| 功耗 | <1W |


400-800-5512
产品
服务
下载中心
关于我们
友情链接






 文件下载
文件下载
